DroneKit-Python API Reference¶
This is the API Reference for the DroneKit-Python API.
The main API is the Vehicle class.
The code snippet below shows how to use connect() to obtain an instance of a connected vehicle:
from dronekit import connect
# Connect to the Vehicle using "connection string" (in this case an address on network)
vehicle = connect('127.0.0.1:14550', wait_ready=True)
Vehicle provides access to vehicle state through python attributes
(e.g. Vehicle.mode)
and to settings/parameters though the Vehicle.parameters attribute.
Asynchronous notification on vehicle attribute changes is available by registering listeners/observers.
Vehicle movement is primarily controlled using the Vehicle.armed attribute and
Vehicle.simple_takeoff() and Vehicle.simple_goto in GUIDED mode.
Velocity-based movement and control over other vehicle features can be achieved using custom MAVLink messages
(Vehicle.send_mavlink(), Vehicle.message_factory()).
It is also possible to work with vehicle “missions” using the Vehicle.commands attribute, and run them in AUTO mode.
All the logging is handled through the builtin Python logging module.
A number of other useful classes and methods are listed below.
-
exception
dronekit.APIException¶ Base class for DroneKit related exceptions.
Parameters: message (String) – Message string describing the exception -
with_traceback()¶ Exception.with_traceback(tb) – set self.__traceback__ to tb and return self.
-
-
class
dronekit.Attitude(pitch, yaw, roll)¶ Attitude information.
An object of this type is returned by
Vehicle.attitude.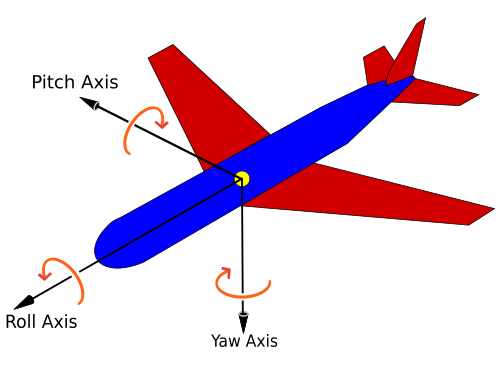
Diagram showing Pitch, Roll, Yaw (Creative Commons)
Parameters: - pitch – Pitch in radians
- yaw – Yaw in radians
- roll – Roll in radians

-
class
dronekit.Battery(voltage, current, level)¶ System battery information.
An object of this type is returned by
Vehicle.battery.Parameters: - voltage – Battery voltage in millivolts.
- current – Battery current, in 10 * milliamperes.
Noneif the autopilot does not support current measurement. - level – Remaining battery energy.
Noneif the autopilot cannot estimate the remaining battery.
-
class
dronekit.Capabilities(capabilities)¶ Autopilot capabilities (supported message types and functionality).
An object of this type is returned by
Vehicle.capabilities.See the enum MAV_PROTOCOL_CAPABILITY.
New in version 2.0.3.
-
mission_float¶ Autopilot supports MISSION float message type (Boolean).
-
param_float¶ Autopilot supports the PARAM float message type (Boolean).
-
mission_int¶ Autopilot supports MISSION_INT scaled integer message type (Boolean).
-
command_int¶ Autopilot supports COMMAND_INT scaled integer message type (Boolean).
-
param_union¶ Autopilot supports the PARAM_UNION message type (Boolean).
-
ftp¶ Autopilot supports ftp for file transfers (Boolean).
-
set_attitude_target¶ Autopilot supports commanding attitude offboard (Boolean).
-
set_attitude_target_local_ned¶ Autopilot supports commanding position and velocity targets in local NED frame (Boolean).
-
set_altitude_target_global_int¶ Autopilot supports commanding position and velocity targets in global scaled integers (Boolean).
-
terrain¶ Autopilot supports terrain protocol / data handling (Boolean).
-
set_actuator_target¶ Autopilot supports direct actuator control (Boolean).
-
flight_termination¶ Autopilot supports the flight termination command (Boolean).
-
compass_calibration¶ Autopilot supports onboard compass calibration (Boolean).
-
-
class
dronekit.Channels(vehicle, count)¶ A dictionary class for managing RC channel information associated with a
Vehicle.An object of this type is accessed through
Vehicle.channels. This object also stores the current vehicle channel overrides through itsoverridesattribute.For more information and examples see Example: Channels and Channel Overrides.
-
clear() → None. Remove all items from D.¶
-
copy() → a shallow copy of D¶
-
count¶ The number of channels defined in the dictionary (currently 8).
-
fromkeys()¶ Create a new dictionary with keys from iterable and values set to value.
-
get()¶ Return the value for key if key is in the dictionary, else default.
-
items() → a set-like object providing a view on D's items¶
-
keys() → a set-like object providing a view on D's keys¶
-
overrides¶ Attribute to read, set and clear channel overrides (also known as “rc overrides”) associated with a
Vehicle(viaVehicle.channels). This is an object of typeChannelsOverride.For more information and examples see Example: Channels and Channel Overrides.
To set channel overrides:
# Set and clear overrids using dictionary syntax (clear by setting override to none) vehicle.channels.overrides = {'5':None, '6':None,'3':500} # You can also set and clear overrides using indexing syntax vehicle.channels.overrides['2'] = 200 vehicle.channels.overrides['2'] = None # Clear using 'del' del vehicle.channels.overrides['3'] # Clear all overrides by setting an empty dictionary vehicle.channels.overrides = {}
Read the channel overrides either as a dictionary or by index. Note that you’ll get a
KeyErrorexception if you read a channel override that has not been set.# Get all channel overrides print " Channel overrides: %s" % vehicle.channels.overrides # Print just one channel override print " Ch2 override: %s" % vehicle.channels.overrides['2']
-
pop(k[, d]) → v, remove specified key and return the corresponding value.¶ If key is not found, d is returned if given, otherwise KeyError is raised
-
popitem() → (k, v), remove and return some (key, value) pair as a¶ 2-tuple; but raise KeyError if D is empty.
-
setdefault()¶ Insert key with a value of default if key is not in the dictionary.
Return the value for key if key is in the dictionary, else default.
-
update([E, ]**F) → None. Update D from dict/iterable E and F.¶ If E is present and has a .keys() method, then does: for k in E: D[k] = E[k] If E is present and lacks a .keys() method, then does: for k, v in E: D[k] = v In either case, this is followed by: for k in F: D[k] = F[k]
-
values() → an object providing a view on D's values¶
-
-
class
dronekit.ChannelsOverride(vehicle)¶ A dictionary class for managing Vehicle channel overrides.
Channels can be read, written, or cleared by index or using a dictionary syntax. To clear a value, set it to
Noneor usedelon the item.An object of this type is returned by
Vehicle.channels.overrides.For more information and examples see Example: Channels and Channel Overrides.
-
clear() → None. Remove all items from D.¶
-
copy() → a shallow copy of D¶
-
fromkeys()¶ Create a new dictionary with keys from iterable and values set to value.
-
get()¶ Return the value for key if key is in the dictionary, else default.
-
items() → a set-like object providing a view on D's items¶
-
keys() → a set-like object providing a view on D's keys¶
-
pop(k[, d]) → v, remove specified key and return the corresponding value.¶ If key is not found, d is returned if given, otherwise KeyError is raised
-
popitem() → (k, v), remove and return some (key, value) pair as a¶ 2-tuple; but raise KeyError if D is empty.
-
setdefault()¶ Insert key with a value of default if key is not in the dictionary.
Return the value for key if key is in the dictionary, else default.
-
update([E, ]**F) → None. Update D from dict/iterable E and F.¶ If E is present and has a .keys() method, then does: for k in E: D[k] = E[k] If E is present and lacks a .keys() method, then does: for k, v in E: D[k] = v In either case, this is followed by: for k in F: D[k] = F[k]
-
values() → an object providing a view on D's values¶
-
-
class
dronekit.Command(target_system, target_component, seq, frame, command, current, autocontinue, param1, param2, param3, param4, x, y, z)¶ A waypoint object.
This object encodes a single mission item command. The set of commands that are supported by ArduPilot in Copter, Plane and Rover (along with their parameters) are listed in the wiki article MAVLink Mission Command Messages (MAV_CMD).
For example, to create a NAV_WAYPOINT command:
cmd = Command(0,0,0, mavutil.mavlink.MAV_FRAME_GLOBAL_RELATIVE_ALT, mavutil.mavlink.MAV_CMD_NAV_WAYPOINT, 0, 0, 0, 0, 0, 0,-34.364114, 149.166022, 30)
Parameters: - target_system – This can be set to any value (DroneKit changes the value to the MAVLink ID of the connected vehicle before the command is sent).
- target_component – The component id if the message is intended for a particular component within the target system (for example, the camera). Set to zero (broadcast) in most cases.
- seq – The sequence number within the mission (the autopilot will reject messages sent out of sequence). This should be set to zero as the API will automatically set the correct value when uploading a mission.
- frame – The frame of reference used for the location parameters (x, y, z). In most cases this will be
mavutil.mavlink.MAV_FRAME_GLOBAL_RELATIVE_ALT, which uses the WGS84 global coordinate system for latitude and longitude, but sets altitude as relative to the home position in metres (home altitude = 0). For more information see the wiki here. - command – The specific mission command (e.g.
mavutil.mavlink.MAV_CMD_NAV_WAYPOINT). The supported commands (and command parameters are listed on the wiki. - current – Set to zero (not supported).
- autocontinue – Set to zero (not supported).
- param1 – Command specific parameter (depends on specific Mission Command (MAV_CMD)).
- param2 – Command specific parameter.
- param3 – Command specific parameter.
- param4 – Command specific parameter.
- x – (param5) Command specific parameter used for latitude (if relevant to command).
- y – (param6) Command specific parameter used for longitude (if relevant to command).
- z – (param7) Command specific parameter used for altitude (if relevant). The reference frame for altitude depends on the
frame.
-
format_attr(field)¶ override field getter
-
class
dronekit.CommandSequence(vehicle)¶ A sequence of vehicle waypoints (a “mission”).
Operations include ‘array style’ indexed access to the various contained waypoints.
The current commands/mission for a vehicle are accessed using the
Vehicle.commandsattribute. Waypoints are not downloaded from vehicle untildownload()is called. The download is asynchronous; usewait_ready()to block your thread until the download is complete. The code to download the commands from a vehicle is shown below:#Connect to a vehicle object (for example, on com14) vehicle = connect('com14', wait_ready=True) # Download the vehicle waypoints (commands). Wait until download is complete. cmds = vehicle.commands cmds.download() cmds.wait_ready()
The set of commands can be changed and uploaded to the client. The changes are not guaranteed to be complete until
upload()is called.cmds = vehicle.commands cmds.clear() lat = -34.364114, lon = 149.166022 altitude = 30.0 cmd = Command(0,0,0, mavutil.mavlink.MAV_FRAME_GLOBAL_RELATIVE_ALT, mavutil.mavlink.MAV_CMD_NAV_WAYPOINT, 0, 0, 0, 0, 0, 0, lat, lon, altitude) cmds.add(cmd) cmds.upload()
-
add(cmd)¶ Add a new command (waypoint) at the end of the command list.
Note
Commands are sent to the vehicle only after you call :
upload().Parameters: cmd (Command) – The command to be added.
-
clear()¶ Clear the command list.
This command will be sent to the vehicle only after you call
upload().
-
count¶ Return number of waypoints.
Returns: The number of waypoints in the sequence.
-
download()¶ Download all waypoints from the vehicle. The download is asynchronous. Use
wait_ready()to block your thread until the download is complete.
-
next¶ Get the currently active waypoint number.
-
upload(timeout=None)¶ Call
upload()afteraddingorclearingmission commands.After the return from
upload()any writes are guaranteed to have completed (or thrown an exception) and future reads will see their effects.Parameters: timeout (int) – The timeout for uploading the mission. No timeout if not provided or set to None.
-
wait_ready(**kwargs)¶ Block the calling thread until waypoints have been downloaded.
This can be called after
download()to block the thread until the asynchronous download is complete.
-
-
class
dronekit.GPSInfo(eph, epv, fix_type, satellites_visible)¶ Standard information about GPS.
If there is no GPS lock the parameters are set to
None.Parameters: - eph (Int) – GPS horizontal dilution of position (HDOP).
- epv (Int) – GPS vertical dilution of position (VDOP).
- fix_type (Int) – 0-1: no fix, 2: 2D fix, 3: 3D fix
- satellites_visible (Int) – Number of satellites visible.
-
class
dronekit.Gimbal(vehicle)¶ Gimbal status and control.
An object of this type is returned by
Vehicle.gimbal. The gimbal orientation can be obtained from itsroll,pitchandyawattributes.The gimbal orientation can be set explicitly using
rotate()or you can set the gimbal (and vehicle) to track a specific “region of interest” usingtarget_location().Note
- The orientation attributes are created with values of
None. If a gimbal is present, the attributes are populated shortly after initialisation by messages from the autopilot. - The attribute values reflect the last gimbal setting-values rather than actual measured values. This means that the values won’t change if you manually move the gimbal, and that the value will change when you set it, even if the specified orientation is not supported.
- A gimbal may not support all axes of rotation. For example, the Solo gimbal will set pitch values from 0 to -90 (straight ahead to straight down), it will rotate the vehicle to follow specified yaw values, and will ignore roll commands (not supported).
-
pitch¶ Gimbal pitch in degrees relative to the vehicle (see diagram for attitude). A value of 0 represents a camera pointed straight ahead relative to the front of the vehicle, while -90 points the camera straight down.
Note
This is the last pitch value sent to the gimbal (not the actual/measured pitch).
-
release()¶ Release control of the gimbal to the user (RC Control).
This should be called once you’ve finished controlling the mount with either
rotate()ortarget_location(). Control will automatically be released if you change vehicle mode.
-
roll¶ Gimbal roll in degrees relative to the vehicle (see diagram for attitude).
Note
This is the last roll value sent to the gimbal (not the actual/measured roll).
-
rotate(pitch, roll, yaw)¶ Rotate the gimbal to a specific vector.
#Point the gimbal straight down vehicle.gimbal.rotate(-90, 0, 0)
Parameters: - pitch – Gimbal pitch in degrees relative to the vehicle (see diagram for attitude). A value of 0 represents a camera pointed straight ahead relative to the front of the vehicle, while -90 points the camera straight down.
- roll – Gimbal roll in degrees relative to the vehicle (see diagram for attitude).
- yaw – Gimbal yaw in degrees relative to global frame (0 is North, 90 is West, 180 is South etc.)
-
target_location(roi)¶ Point the gimbal at a specific region of interest (ROI).
#Set the camera to track the current home location. vehicle.gimbal.target_location(vehicle.home_location)
The target position must be defined in a
LocationGlobalRelativeorLocationGlobal.This function can be called in AUTO or GUIDED mode.
In order to clear an ROI you can send a location with all zeros (e.g.
LocationGlobalRelative(0,0,0)).Parameters: roi – Target location in global relative frame.
-
yaw¶ Gimbal yaw in degrees relative to global frame (0 is North, 90 is West, 180 is South etc).
Note
This is the last yaw value sent to the gimbal (not the actual/measured yaw).
- The orientation attributes are created with values of
-
class
dronekit.LocationGlobal(lat, lon, alt=None)¶ A global location object.
The latitude and longitude are relative to the WGS84 coordinate system. The altitude is relative to mean sea-level (MSL).
For example, a global location object with altitude 30 metres above sea level might be defined as:
LocationGlobal(-34.364114, 149.166022, 30)
An object of this type is owned by
Vehicle.location. See that class for information on reading and observing location in the global frame.Parameters: - lat – Latitude.
- lon – Longitude.
- alt – Altitude in meters relative to mean sea-level (MSL).
-
class
dronekit.LocationGlobalRelative(lat, lon, alt=None)¶ A global location object, with attitude relative to home location altitude.
The latitude and longitude are relative to the WGS84 coordinate system. The altitude is relative to the home position.
For example, a
LocationGlobalRelativeobject with an altitude of 30 metres above the home location might be defined as:LocationGlobalRelative(-34.364114, 149.166022, 30)
An object of this type is owned by
Vehicle.location. See that class for information on reading and observing location in the global-relative frame.Parameters: - lat – Latitude.
- lon – Longitude.
- alt – Altitude in meters (relative to the home location).
-
class
dronekit.LocationLocal(north, east, down)¶ A local location object.
The north, east and down are relative to the EKF origin. This is most likely the location where the vehicle was turned on.
An object of this type is owned by
Vehicle.location. See that class for information on reading and observing location in the local frame.Parameters: - north – Position north of the EKF origin in meters.
- east – Position east of the EKF origin in meters.
- down – Position down from the EKF origin in meters. (i.e. negative altitude in meters)
-
distance_home()¶ Distance away from home, in meters. Returns 3D distance if down is known, otherwise 2D distance.
-
class
dronekit.Locations(vehicle)¶ An object for holding location information in global, global relative and local frames.
Vehicleowns an object of this type. SeeVehicle.locationfor information on reading and observing location in the different frames.The different frames are accessed through the members, which are created with this object. They can be read, and are observable.
-
add_attribute_listener(attr_name, observer)¶ Add an attribute listener callback.
The callback function (
observer) is invoked differently depending on the type of attribute. Attributes that represent sensor values or which are used to monitor connection status are updated whenever a message is received from the vehicle. Attributes which reflect vehicle “state” are only updated when their values change (for exampleVehicle.system_status,Vehicle.armed, andVehicle.mode).The callback can be removed using
remove_attribute_listener().Note
The
on_attribute()decorator performs the same operation as this method, but with a more elegant syntax. Useadd_attribute_listenerby preference if you will need to remove the observer.The argument list for the callback is
observer(object, attr_name, attribute_value):self- the associatedVehicle. This may be compared to a global vehicle handle to implement vehicle-specific callback handling (if needed).attr_name- the attribute name. This can be used to infer which attribute has triggered if the same callback is used for watching several attributes.value- the attribute value (so you don’t need to re-query the vehicle object).
The example below shows how to get callbacks for (global) location changes:
#Callback to print the location in global frame def location_callback(self, attr_name, msg): print "Location (Global): ", msg #Add observer for the vehicle's current location vehicle.add_attribute_listener('global_frame', location_callback)
See Observing attribute changes for more information.
Parameters: - attr_name (String) – The name of the attribute to watch (or ‘*’ to watch all attributes).
- observer – The callback to invoke when a change in the attribute is detected.
-
global_frame¶ Location in global frame (a
LocationGlobal).The latitude and longitude are relative to the WGS84 coordinate system. The altitude is relative to mean sea-level (MSL).
This is accessed through the
Vehicle.locationattribute:print "Global Location: %s" % vehicle.location.global_frame print "Sea level altitude is: %s" % vehicle.location.global_frame.alt
Its
latandlonattributes are populated shortly after GPS becomes available. Thealtcan take several seconds longer to populate (from the barometer). Listeners are not notified of changes to this attribute until it has fully populated.To watch for changes you can use
Vehicle.on_attribute()decorator oradd_attribute_listener()(decorator approach shown below):@vehicle.on_attribute('location.global_frame') def listener(self, attr_name, value): print " Global: %s" % value #Alternatively, use decorator: ``@vehicle.location.on_attribute('global_frame')``.
-
global_relative_frame¶ Location in global frame, with altitude relative to the home location (a
LocationGlobalRelative).The latitude and longitude are relative to the WGS84 coordinate system. The altitude is relative to
home location.This is accessed through the
Vehicle.locationattribute:print "Global Location (relative altitude): %s" % vehicle.location.global_relative_frame print "Altitude relative to home_location: %s" % vehicle.location.global_relative_frame.alt
-
local_frame¶ Location in local NED frame (a
LocationGlobalRelative).This is accessed through the
Vehicle.locationattribute:print "Local Location: %s" % vehicle.location.local_frame
This location will not start to update until the vehicle is armed.
-
notify_attribute_listeners(attr_name, value, cache=False)¶ This method is used to update attribute observers when the named attribute is updated.
You should call it in your message listeners after updating an attribute with information from a vehicle message.
By default the value of
cacheisFalseand every update from the vehicle is sent to listeners (whether or not the attribute has changed). This is appropriate for attributes which represent sensor or heartbeat-type monitoring.Set
cache=Trueto update listeners only when the value actually changes (cache the previous attribute value). This should be used where clients will only ever need to know the value when it has changed. For example, this setting has been used for notifyingmodechanges.See Example: Create Attribute in App for more information.
Parameters: - attr_name (String) – The name of the attribute that has been updated.
- value – The current value of the attribute that has been updated.
- cache (Boolean) – Set
Trueto only notify observers when the attribute value changes.
-
on_attribute(name)¶ Decorator for attribute listeners.
The decorated function (
observer) is invoked differently depending on the type of attribute. Attributes that represent sensor values or which are used to monitor connection status are updated whenever a message is received from the vehicle. Attributes which reflect vehicle “state” are only updated when their values change (for exampleVehicle.system_status(),Vehicle.armed, andVehicle.mode).The argument list for the callback is
observer(object, attr_name, attribute_value)self- the associatedVehicle. This may be compared to a global vehicle handle to implement vehicle-specific callback handling (if needed).attr_name- the attribute name. This can be used to infer which attribute has triggered if the same callback is used for watching several attributes.msg- the attribute value (so you don’t need to re-query the vehicle object).
Note
There is no way to remove an attribute listener added with this decorator. Use
add_attribute_listener()if you need to be able to remove theattribute listener.The code fragment below shows how you can create a listener for the attitude attribute.
@vehicle.on_attribute('attitude') def attitude_listener(self, name, msg): print '%s attribute is: %s' % (name, msg)
See Observing attribute changes for more information.
Parameters: - name (String) – The name of the attribute to watch (or ‘*’ to watch all attributes).
- observer – The callback to invoke when a change in the attribute is detected.
-
remove_attribute_listener(attr_name, observer)¶ Remove an attribute listener (observer) that was previously added using
add_attribute_listener().For example, the following line would remove a previously added vehicle ‘global_frame’ observer called
location_callback:vehicle.remove_attribute_listener('global_frame', location_callback)
See Observing attribute changes for more information.
Parameters: - attr_name (String) – The attribute name that is to have an observer removed (or ‘*’ to remove an ‘all attribute’ observer).
- observer – The callback function to remove.
-
-
class
dronekit.Parameters(vehicle)¶ This object is used to get and set the values of named parameters for a vehicle. See the following links for information about the supported parameters for each platform: Copter Parameters, Plane Parameters, Rover Parameters.
The code fragment below shows how to get and set the value of a parameter.
# Print the value of the THR_MIN parameter. print "Param: %s" % vehicle.parameters['THR_MIN'] # Change the parameter value to something different. vehicle.parameters['THR_MIN']=100
It is also possible to observe parameters and to iterate the
Vehicle.parameters.For more information see the guide.
-
add_attribute_listener(attr_name, *args, **kwargs)¶ Add a listener callback on a particular parameter.
The callback can be removed using
remove_attribute_listener().Note
The
on_attribute()decorator performs the same operation as this method, but with a more elegant syntax. Useadd_attribute_listeneronly if you will need to remove the observer.The callback function is invoked only when the parameter changes.
The callback arguments are:
self- the associatedParameters.attr_name- the parameter name. This can be used to infer which parameter has triggered if the same callback is used for watching multiple parameters.msg- the new parameter value (so you don’t need to re-query the vehicle object).
The example below shows how to get callbacks for the
THR_MINparameter:#Callback function for the THR_MIN parameter def thr_min_callback(self, attr_name, value): print " PARAMETER CALLBACK: %s changed to: %s" % (attr_name, value) #Add observer for the vehicle's THR_MIN parameter vehicle.parameters.add_attribute_listener('THR_MIN', thr_min_callback)
See Observing parameter changes for more information.
Parameters: - attr_name (String) – The name of the parameter to watch (or ‘*’ to watch all parameters).
- args – The callback to invoke when a change in the parameter is detected.
-
clear() → None. Remove all items from D.¶
-
get(k[, d]) → D[k] if k in D, else d. d defaults to None.¶
-
items() → a set-like object providing a view on D's items¶
-
keys() → a set-like object providing a view on D's keys¶
-
notify_attribute_listeners(attr_name, *args, **kwargs)¶ This method is used to update attribute observers when the named attribute is updated.
You should call it in your message listeners after updating an attribute with information from a vehicle message.
By default the value of
cacheisFalseand every update from the vehicle is sent to listeners (whether or not the attribute has changed). This is appropriate for attributes which represent sensor or heartbeat-type monitoring.Set
cache=Trueto update listeners only when the value actually changes (cache the previous attribute value). This should be used where clients will only ever need to know the value when it has changed. For example, this setting has been used for notifyingmodechanges.See Example: Create Attribute in App for more information.
Parameters: - attr_name (String) – The name of the attribute that has been updated.
- value – The current value of the attribute that has been updated.
- cache (Boolean) – Set
Trueto only notify observers when the attribute value changes.
-
on_attribute(attr_name, *args, **kwargs)¶ Decorator for parameter listeners.
Note
There is no way to remove a listener added with this decorator. Use
add_attribute_listener()if you need to be able to remove thelistener.The callback function is invoked only when the parameter changes.
The callback arguments are:
self- the associatedParameters.attr_name- the parameter name. This can be used to infer which parameter has triggered if the same callback is used for watching multiple parameters.msg- the new parameter value (so you don’t need to re-query the vehicle object).
The code fragment below shows how to get callbacks for the
THR_MINparameter:@vehicle.parameters.on_attribute('THR_MIN') def decorated_thr_min_callback(self, attr_name, value): print " PARAMETER CALLBACK: %s changed to: %s" % (attr_name, value)
See Observing parameter changes for more information.
Parameters: - attr_name (String) – The name of the parameter to watch (or ‘*’ to watch all parameters).
- args – The callback to invoke when a change in the parameter is detected.
-
pop(k[, d]) → v, remove specified key and return the corresponding value.¶ If key is not found, d is returned if given, otherwise KeyError is raised.
-
popitem() → (k, v), remove and return some (key, value) pair¶ as a 2-tuple; but raise KeyError if D is empty.
-
remove_attribute_listener(attr_name, *args, **kwargs)¶ Remove a paremeter listener that was previously added using
add_attribute_listener().For example to remove the
thr_min_callback()callback function:vehicle.parameters.remove_attribute_listener('thr_min', thr_min_callback)
See Observing parameter changes for more information.
Parameters: - attr_name (String) – The parameter name that is to have an observer removed (or ‘*’ to remove an ‘all attribute’ observer).
- args – The callback function to remove.
-
setdefault(k[, d]) → D.get(k,d), also set D[k]=d if k not in D¶
-
update([E, ]**F) → None. Update D from mapping/iterable E and F.¶ If E present and has a .keys() method, does: for k in E: D[k] = E[k] If E present and lacks .keys() method, does: for (k, v) in E: D[k] = v In either case, this is followed by: for k, v in F.items(): D[k] = v
-
values() → an object providing a view on D's values¶
-
wait_ready(**kwargs)¶ Block the calling thread until parameters have been downloaded
-
-
class
dronekit.Rangefinder(distance, voltage)¶ Rangefinder readings.
An object of this type is returned by
Vehicle.rangefinder.Parameters: - distance – Distance (metres).
Noneif the vehicle doesn’t have a rangefinder. - voltage – Voltage (volts).
Noneif the vehicle doesn’t have a rangefinder.
- distance – Distance (metres).
-
class
dronekit.SystemStatus(state)¶ This object is used to get and set the current “system status”.
An object of this type is returned by
Vehicle.system_status.-
state¶ The system state, as a
string.
-
-
exception
dronekit.TimeoutError¶ Raised by operations that have timeouts.
-
with_traceback()¶ Exception.with_traceback(tb) – set self.__traceback__ to tb and return self.
-
-
class
dronekit.Vehicle(handler)¶ The main vehicle API.
Vehicle state is exposed through ‘attributes’ (e.g.
heading). All attributes can be read, and some are also settable (mode,armedandhome_location).Attributes can also be asynchronously monitored for changes by registering listener callback functions.
Vehicle “settings” (parameters) are read/set using the
parametersattribute. Parameters can be iterated and are also individually observable.Vehicle movement is primarily controlled using the
armedattribute andsimple_takeoff()andsimple_goto()in GUIDED mode.It is also possible to work with vehicle “missions” using the
commandsattribute, and run them in AUTO mode.STATUSTEXT log messages from the autopilot are handled through a separate logger. It is possible to configure the log level, the formatting, etc. by accessing the logger, e.g.:
import logging autopilot_logger = logging.getLogger('autopilot') autopilot_logger.setLevel(logging.DEBUG)
The guide contains more detailed information on the different ways you can use the
Vehicleclass:Note
This class currently exposes just the attributes that are most commonly used by all vehicle types. if you need to add additional attributes then subclass
Vehicleas demonstrated in Example: Create Attribute in App.Please then contribute your additions back to the project!
-
add_attribute_listener(attr_name, observer)¶ Add an attribute listener callback.
The callback function (
observer) is invoked differently depending on the type of attribute. Attributes that represent sensor values or which are used to monitor connection status are updated whenever a message is received from the vehicle. Attributes which reflect vehicle “state” are only updated when their values change (for exampleVehicle.system_status,Vehicle.armed, andVehicle.mode).The callback can be removed using
remove_attribute_listener().Note
The
on_attribute()decorator performs the same operation as this method, but with a more elegant syntax. Useadd_attribute_listenerby preference if you will need to remove the observer.The argument list for the callback is
observer(object, attr_name, attribute_value):self- the associatedVehicle. This may be compared to a global vehicle handle to implement vehicle-specific callback handling (if needed).attr_name- the attribute name. This can be used to infer which attribute has triggered if the same callback is used for watching several attributes.value- the attribute value (so you don’t need to re-query the vehicle object).
The example below shows how to get callbacks for (global) location changes:
#Callback to print the location in global frame def location_callback(self, attr_name, msg): print "Location (Global): ", msg #Add observer for the vehicle's current location vehicle.add_attribute_listener('global_frame', location_callback)
See Observing attribute changes for more information.
Parameters: - attr_name (String) – The name of the attribute to watch (or ‘*’ to watch all attributes).
- observer – The callback to invoke when a change in the attribute is detected.
-
add_message_listener(name, fn)¶ Adds a message listener function that will be called every time the specified message is received.
Tip
We recommend you use
on_message()instead of this method as it has a more elegant syntax. This method is only preferred if you need to be able toremove the listener.The callback function must have three arguments:
self- the current vehicle.name- the name of the message that was intercepted.message- the actual message (a pymavlink class).
For example, in the fragment below
my_methodwill be called for every heartbeat message:#Callback method for new messages def my_method(self, name, msg): pass vehicle.add_message_listener('HEARTBEAT',my_method)
See MAVLink Messages for more information.
Parameters: - name (String) – The name of the message to be intercepted by the listener function (or ‘*’ to get all messages).
- fn – The listener function that will be called if a message is received.
-
airspeed¶ Current airspeed in metres/second (
double).This attribute is settable. The set value is the default target airspeed when moving the vehicle using
simple_goto()(or other position-based movement commands).
-
arm(wait=True, timeout=None)¶ Arm the vehicle.
If wait is True, wait for arm operation to complete before returning. If timeout is nonzero, raise a TimeouTerror if the vehicle has not armed after timeout seconds.
-
armed¶ This attribute can be used to get and set the
armedstate of the vehicle (boolean).The code below shows how to read the state, and to arm/disarm the vehicle:
# Print the armed state for the vehicle print "Armed: %s" % vehicle.armed # Disarm the vehicle vehicle.armed = False # Arm the vehicle vehicle.armed = True
-
capabilities¶ The autopilot capabilities in a
Capabilitiesobject.New in version 2.0.3.
-
channels¶ The RC channel values from the RC Transmitter (
Channels).The attribute can also be used to set and read RC Override (channel override) values via
Vehicle.channels.override.For more information and examples see Example: Channels and Channel Overrides.
To read the channels from the RC transmitter:
# Get all channel values from RC transmitter print "Channel values from RC Tx:", vehicle.channels # Access channels individually print "Read channels individually:" print " Ch1: %s" % vehicle.channels['1'] print " Ch2: %s" % vehicle.channels['2']
-
commands¶ Gets the editable waypoints/current mission for this vehicle (
CommandSequence).This can be used to get, create, and modify a mission.
Returns: A CommandSequencecontaining the waypoints for this vehicle.
-
disarm(wait=True, timeout=None)¶ Disarm the vehicle.
If wait is True, wait for disarm operation to complete before returning. If timeout is nonzero, raise a TimeouTerror if the vehicle has not disarmed after timeout seconds.
-
ekf_ok¶ Trueif the EKF status is considered acceptable,Falseotherwise (boolean).
-
flush()¶ Call
flush()afteraddingorclearingmission commands.After the return from
flush()any writes are guaranteed to have completed (or thrown an exception) and future reads will see their effects.Warning
This method is deprecated. It has been replaced by
Vehicle.commands.upload().
-
gimbal¶ Gimbal object for controlling, viewing and observing gimbal status (
Gimbal).New in version 2.0.1.
-
groundspeed¶ Current groundspeed in metres/second (
double).This attribute is settable. The set value is the default target groundspeed when moving the vehicle using
simple_goto()(or other position-based movement commands).
-
heading¶ Current heading in degrees - 0..360, where North = 0 (
int).
-
home_location¶ The current home location (
LocationGlobal).To get the attribute you must first download the
Vehicle.commands(). The attribute has a value ofNoneuntilVehicle.commands()has been downloaded and the autopilot has set an initial home location (typically where the vehicle first gets GPS lock).#Connect to a vehicle object (for example, on com14) vehicle = connect('com14', wait_ready=True) # Download the vehicle waypoints (commands). Wait until download is complete. cmds = vehicle.commands cmds.download() cmds.wait_ready() # Get the home location home = vehicle.home_location
The
home_locationis not observable.The attribute can be written (in the same way as any other attribute) after it has successfully been populated from the vehicle. The value sent to the vehicle is cached in the attribute (and can potentially get out of date if you don’t re-download
Vehicle.commands):Warning
Setting the value will fail silently if the specified location is more than 50km from the EKF origin.
-
is_armable¶ Returns
Trueif the vehicle is ready to arm, false otherwise (Boolean).This attribute wraps a number of pre-arm checks, ensuring that the vehicle has booted, has a good GPS fix, and that the EKF pre-arm is complete.
-
last_heartbeat¶ Time since last MAVLink heartbeat was received (in seconds).
The attribute can be used to monitor link activity and implement script-specific timeout handling.
For example, to pause the script if no heartbeat is received for more than 1 second you might implement the following observer, and use
pause_scriptin a program loop to wait until the link is recovered:pause_script=False @vehicle.on_attribute('last_heartbeat') def listener(self, attr_name, value): global pause_script if value > 1 and not pause_script: print "Pausing script due to bad link" pause_script=True; if value < 1 and pause_script: pause_script=False; print "Un-pausing script"
The observer will be called at the period of the messaging loop (about every 0.01 seconds). Testing on SITL indicates that
last_heartbeataverages about .5 seconds, but will rarely exceed 1.5 seconds when connected. Whether heartbeat monitoring can be useful will very much depend on the application.Note
If you just want to change the heartbeat timeout you can modify the
heartbeat_timeoutparameter passed to theconnect()function.
-
location¶ The vehicle location in global, global relative and local frames (
Locations).The different frames are accessed through its members:
global_frame(LocationGlobal)global_relative_frame(LocationGlobalRelative)local_frame(LocationLocal)
For example, to print the location in each frame for a
vehicle:# Print location information for `vehicle` in all frames (default printer) print "Global Location: %s" % vehicle.location.global_frame print "Global Location (relative altitude): %s" % vehicle.location.global_relative_frame print "Local Location: %s" % vehicle.location.local_frame #NED # Print altitudes in the different frames (see class definitions for other available information) print "Altitude (global frame): %s" % vehicle.location.global_frame.alt print "Altitude (global relative frame): %s" % vehicle.location.global_relative_frame.alt print "Altitude (NED frame): %s" % vehicle.location.local_frame.down
Note
All the location “values” (e.g.
global_frame.lat) are initially created with valueNone. Theglobal_frame,global_relative_framelatitude and longitude values are populated shortly after initialisation butglobal_frame.altmay take a few seconds longer to be updated. Thelocal_framedoes not populate until the vehicle is armed.The attribute and its members are observable. To watch for changes in all frames using a listener created using a decorator (you can also define a listener and explicitly add it).
@vehicle.on_attribute('location') def listener(self, attr_name, value): # `self`: :py:class:`Vehicle` object that has been updated. # `attr_name`: name of the observed attribute - 'location' # `value` is the updated attribute value (a :py:class:`Locations`). This can be queried for the frame information print " Global: %s" % value.global_frame print " GlobalRelative: %s" % value.global_relative_frame print " Local: %s" % value.local_frame
To watch for changes in just one attribute (in this case
global_frame):@vehicle.on_attribute('location.global_frame') def listener(self, attr_name, value): # `self`: :py:class:`Locations` object that has been updated. # `attr_name`: name of the observed attribute - 'global_frame' # `value` is the updated attribute value. print " Global: %s" % value #Or watch using decorator: ``@vehicle.location.on_attribute('global_frame')``.
-
message_factory¶ Returns an object that can be used to create ‘raw’ MAVLink messages that are appropriate for this vehicle. The message can then be sent using
send_mavlink(message).Note
Vehicles support a subset of the messages defined in the MAVLink standard. For more information about the supported sets see wiki topics: Copter Commands in Guided Mode and Plane Commands in Guided Mode.
All message types are defined in the central MAVLink github repository. For example, a Pixhawk understands the following messages (from pixhawk.xml):
<message id="153" name="IMAGE_TRIGGER_CONTROL"> <field type="uint8_t" name="enable">0 to disable, 1 to enable</field> </message>
The name of the factory method will always be the lower case version of the message name with _encode appended. Each field in the XML message definition must be listed as arguments to this factory method. So for this example message, the call would be:
msg = vehicle.message_factory.image_trigger_control_encode(True) vehicle.send_mavlink(msg)
Some message types include “addressing information”. If present, there is no need to specify the
target_systemid (just set to zero) as DroneKit will automatically update messages with the correct ID for the connected vehicle before sending. Thetarget_componentshould be set to 0 (broadcast) unless the message is to specific component. CRC fields and sequence numbers (if defined in the message type) are automatically set by DroneKit and can also be ignored/set to zero.For more information see the guide topic: Sending messages/commands.
-
mode¶ This attribute is used to get and set the current flight mode. You can specify the value as a
VehicleMode, like this:vehicle.mode = VehicleMode('LOITER')
Or as a simple string:
vehicle.mode = 'LOITER'
If you are targeting ArduPilot you can also specify the flight mode using a numeric value (this will not work with PX4 autopilots):
# set mode to LOITER vehicle.mode = 5
-
mount_status¶ Warning
This method is deprecated. It has been replaced by
gimbal.Current status of the camera mount (gimbal) as a three element list:
[ pitch, yaw, roll ].The values in the list are set to
Noneif no mount is configured.
-
notify_attribute_listeners(attr_name, value, cache=False)¶ This method is used to update attribute observers when the named attribute is updated.
You should call it in your message listeners after updating an attribute with information from a vehicle message.
By default the value of
cacheisFalseand every update from the vehicle is sent to listeners (whether or not the attribute has changed). This is appropriate for attributes which represent sensor or heartbeat-type monitoring.Set
cache=Trueto update listeners only when the value actually changes (cache the previous attribute value). This should be used where clients will only ever need to know the value when it has changed. For example, this setting has been used for notifyingmodechanges.See Example: Create Attribute in App for more information.
Parameters: - attr_name (String) – The name of the attribute that has been updated.
- value – The current value of the attribute that has been updated.
- cache (Boolean) – Set
Trueto only notify observers when the attribute value changes.
-
on_attribute(name)¶ Decorator for attribute listeners.
The decorated function (
observer) is invoked differently depending on the type of attribute. Attributes that represent sensor values or which are used to monitor connection status are updated whenever a message is received from the vehicle. Attributes which reflect vehicle “state” are only updated when their values change (for exampleVehicle.system_status(),Vehicle.armed, andVehicle.mode).The argument list for the callback is
observer(object, attr_name, attribute_value)self- the associatedVehicle. This may be compared to a global vehicle handle to implement vehicle-specific callback handling (if needed).attr_name- the attribute name. This can be used to infer which attribute has triggered if the same callback is used for watching several attributes.msg- the attribute value (so you don’t need to re-query the vehicle object).
Note
There is no way to remove an attribute listener added with this decorator. Use
add_attribute_listener()if you need to be able to remove theattribute listener.The code fragment below shows how you can create a listener for the attitude attribute.
@vehicle.on_attribute('attitude') def attitude_listener(self, name, msg): print '%s attribute is: %s' % (name, msg)
See Observing attribute changes for more information.
Parameters: - name (String) – The name of the attribute to watch (or ‘*’ to watch all attributes).
- observer – The callback to invoke when a change in the attribute is detected.
-
on_message(name)¶ Decorator for message listener callback functions.
Tip
This is the most elegant way to define message listener callback functions. Use
add_message_listener()only if you need to be able toremove the listenerlater.A decorated message listener function is called with three arguments every time the specified message is received:
self- the current vehicle.name- the name of the message that was intercepted.message- the actual message (a pymavlink class).
For example, in the fragment below
my_methodwill be called for every heartbeat message:@vehicle.on_message('HEARTBEAT') def my_method(self, name, msg): pass
See MAVLink Messages for more information.
Parameters: name (String) – The name of the message to be intercepted by the decorated listener function (or ‘*’ to get all messages).
-
parameters¶ The (editable) parameters for this vehicle (
Parameters).
-
play_tune(tune)¶ Play a tune on the vehicle
-
rangefinder¶ Rangefinder distance and voltage values (
Rangefinder).
-
reboot()¶ Requests an autopilot reboot by sending a
MAV_CMD_PREFLIGHT_REBOOT_SHUTDOWNcommand.
-
remove_attribute_listener(attr_name, observer)¶ Remove an attribute listener (observer) that was previously added using
add_attribute_listener().For example, the following line would remove a previously added vehicle ‘global_frame’ observer called
location_callback:vehicle.remove_attribute_listener('global_frame', location_callback)
See Observing attribute changes for more information.
Parameters: - attr_name (String) – The attribute name that is to have an observer removed (or ‘*’ to remove an ‘all attribute’ observer).
- observer – The callback function to remove.
-
remove_message_listener(name, fn)¶ Removes a message listener (that was previously added using
add_message_listener()).See MAVLink Messages for more information.
Parameters: - name (String) – The name of the message for which the listener is to be removed (or ‘*’ to remove an ‘all messages’ observer).
- fn – The listener callback function to remove.
-
send_calibrate_accelerometer(simple=False)¶ Request accelerometer calibration.
Parameters: simple – if True, perform simple accelerometer calibration
-
send_calibrate_barometer()¶ Request barometer calibration.
-
send_calibrate_gyro()¶ Request gyroscope calibration.
-
send_calibrate_magnetometer()¶ Request magnetometer calibration.
-
send_calibrate_vehicle_level()¶ Request vehicle level (accelerometer trim) calibration.
-
send_capabilities_request(vehicle, name, m)¶ Request an AUTOPILOT_VERSION packet
-
send_capabilties_request(vehicle, name, m)¶ An alias for send_capabilities_request.
The word “capabilities” was misspelled in previous versions of this code. This is simply an alias to send_capabilities_request using the legacy name.
-
send_mavlink(message)¶ This method is used to send raw MAVLink “custom messages” to the vehicle.
The function can send arbitrary messages/commands to the connected vehicle at any time and in any vehicle mode. It is particularly useful for controlling vehicles outside of missions (for example, in GUIDED mode).
The
message_factoryis used to create messages in the appropriate format.For more information see the guide topic: Sending messages/commands.
Parameters: message – A MAVLink_messageinstance, created usingmessage_factory. There is need to specify the system id, component id or sequence number of messages as the API will set these appropriately.
-
simple_goto(location, airspeed=None, groundspeed=None)¶ Go to a specified global location (
LocationGlobalorLocationGlobalRelative).There is no mechanism for notification when the target location is reached, and if another command arrives before that point that will be executed immediately.
You can optionally set the desired airspeed or groundspeed (this is identical to setting
airspeedorgroundspeed). The vehicle will determine what speed to use if the values are not set or if they are both set.The method will change the
VehicleModetoGUIDEDif necessary.# Set mode to guided - this is optional as the simple_goto method will change the mode if needed. vehicle.mode = VehicleMode("GUIDED") # Set the LocationGlobal to head towards a_location = LocationGlobal(-34.364114, 149.166022, 30) vehicle.simple_goto(a_location)
Parameters: - location – The target location (
LocationGlobalorLocationGlobalRelative). - airspeed – Target airspeed in m/s (optional).
- groundspeed – Target groundspeed in m/s (optional).
- location – The target location (
-
simple_takeoff(alt=None)¶ Take off and fly the vehicle to the specified altitude (in metres) and then wait for another command.
Note
This function should only be used on Copter vehicles.
The vehicle must be in GUIDED mode and armed before this is called.
There is no mechanism for notification when the correct altitude is reached, and if another command arrives before that point (e.g.
simple_goto()) it will be run instead.Warning
Apps should code to ensure that the vehicle will reach a safe altitude before other commands are executed. A good example is provided in the guide topic Taking Off.
Parameters: alt – Target height, in metres.
-
system_status¶ System status (
SystemStatus).The status has a
stateproperty with one of the following values:UNINIT: Uninitialized system, state is unknown.BOOT: System is booting up.CALIBRATING: System is calibrating and not flight-ready.STANDBY: System is grounded and on standby. It can be launched any time.ACTIVE: System is active and might be already airborne. Motors are engaged.CRITICAL: System is in a non-normal flight mode. It can however still navigate.EMERGENCY: System is in a non-normal flight mode. It lost control over parts or over the whole airframe. It is in mayday and going down.POWEROFF: System just initialized its power-down sequence, will shut down now.
-
velocity¶ Current velocity as a three element list
[ vx, vy, vz ](in meter/sec).
-
wait_for(condition, timeout=None, interval=0.1, errmsg=None)¶ Wait for a condition to be True.
Wait for condition, a callable, to return True. If timeout is nonzero, raise a TimeoutError(errmsg) if the condition is not True after timeout seconds. Check the condition everal interval seconds.
-
wait_for_alt(alt, epsilon=0.1, rel=True, timeout=None)¶ Wait for the vehicle to reach the specified altitude.
Wait for the vehicle to get within epsilon meters of the given altitude. If rel is True (the default), use the global_relative_frame. If rel is False, use the global_frame. If timeout is nonzero, raise a TimeoutError if the specified altitude has not been reached after timeout seconds.
-
wait_for_armable(timeout=None)¶ Wait for the vehicle to become armable.
If timeout is nonzero, raise a TimeoutError if the vehicle is not armable after timeout seconds.
-
wait_for_mode(mode, timeout=None)¶ Set the flight mode.
If wait is True, wait for the mode to change before returning. If timeout is nonzero, raise a TimeoutError if the flight mode hasn’t changed after timeout seconds.
-
wait_ready(*types, **kwargs)¶ Waits for specified attributes to be populated from the vehicle (values are initially
None).This is typically called “behind the scenes” to ensure that
connect()does not return until attributes have populated (via thewait_readyparameter). You can also use it after connecting to wait on a specific value(s).There are two ways to call the method:
#Wait on default attributes to populate vehicle.wait_ready(True) #Wait on specified attributes (or array of attributes) to populate vehicle.wait_ready('mode','airspeed')
Using the
wait_ready(True)waits onparameters,gps_0,armed,mode, andattitude. In practice this usually means that all supported attributes will be populated.By default, the method will timeout after 30 seconds and raise an exception if the attributes were not populated.
Parameters: - types –
Trueto wait on the default set of attributes, or a comma-separated list of the specific attributes to wait on. - timeout (int) – Timeout in seconds after which the method will raise an exception
(the default) or return
False. The default timeout is 30 seconds. - raise_exception (Boolean) – If
Truethe method will raise an exception on timeout, otherwise the method will returnFalse. The default isTrue(raise exception).
- types –
-
-
class
dronekit.VehicleMode(name)¶ This object is used to get and set the current “flight mode”.
The flight mode determines the behaviour of the vehicle and what commands it can obey. The recommended flight modes for DroneKit-Python apps depend on the vehicle type:
- Copter apps should use
AUTOmode for “normal” waypoint missions andGUIDEDmode otherwise. - Plane and Rover apps should use the
AUTOmode in all cases, re-writing the mission commands if “dynamic” behaviour is required (they support only a limited subset of commands inGUIDEDmode). - Some modes like
RETURN_TO_LAUNCHcan be used on all platforms. Care should be taken when using manual modes as these may require remote control input from the user.
The available set of supported flight modes is vehicle-specific (see Copter Modes, Plane Modes, Rover Modes). If an unsupported mode is set the script will raise a
KeyErrorexception.The
Vehicle.modeattribute can be queried for the current mode. The code snippet below shows how to observe changes to the mode and then read the value:#Callback definition for mode observer def mode_callback(self, attr_name): print "Vehicle Mode", self.mode #Add observer callback for attribute `mode` vehicle.add_attribute_listener('mode', mode_callback)
The code snippet below shows how to change the vehicle mode to AUTO:
# Set the vehicle into auto mode vehicle.mode = VehicleMode("AUTO")
For more information on getting/setting/observing the
Vehicle.mode(and other attributes) see the attributes guide.-
name¶ The mode name, as a
string.
- Copter apps should use
-
class
dronekit.Version(raw_version, autopilot_type, vehicle_type)¶ Autopilot version and type.
An object of this type is returned by
Vehicle.version.The version number can be read in a few different formats. To get it in a human-readable format, just print vehicle.version. This might print something like “APM:Copter-3.3.2-rc4”.
New in version 2.0.3.
-
major¶ Major version number (integer).
-
patch¶ Patch version number (integer).
-
release¶ Release type (integer). See the enum FIRMWARE_VERSION_TYPE.
This is a composite of the product release cycle stage (rc, beta etc) and the version in that cycle - e.g. 23.
-
is_stable()¶ Returns True if the autopilot reports that the current firmware is a stable release (not a pre-release or development version).
-
release_type()¶ Returns text describing the release type e.g. “alpha”, “stable” etc.
-
release_version()¶ Returns the version within the release type (an integer). This method returns “23” for Copter-3.3rc23.
-
-
dronekit.connect(ip, _initialize=True, wait_ready=None, timeout=30, still_waiting_callback=<function default_still_waiting_callback>, still_waiting_interval=1, status_printer=None, vehicle_class=None, rate=4, baud=115200, heartbeat_timeout=30, source_system=255, source_component=0, use_native=False)¶ Returns a
Vehicleobject connected to the address specified by string parameterip. Connection string parameters (ip) for different targets are listed in the getting started guide.The method is usually called with
wait_ready=Trueto ensure that vehicle parameters and (most) attributes are available whenconnect()returns.from dronekit import connect # Connect to the Vehicle using "connection string" (in this case an address on network) vehicle = connect('127.0.0.1:14550', wait_ready=True)
Parameters: - ip (String) – Connection string for target address - e.g. 127.0.0.1:14550.
- wait_ready (Bool/Array) –
If
Truewait until all default attributes have downloaded before the method returns (default isNone). The default attributes to wait on are:parameters,gps_0,armed,mode, andattitude.You can also specify a named set of parameters to wait on (e.g.
wait_ready=['system_status','mode']).For more information see
Vehicle.wait_ready. - status_printer – (deprecated) method of signature
def status_printer(txt)that prints STATUS_TEXT messages from the Vehicle and other diagnostic information. By default the status information is handled by theautopilotlogger. - vehicle_class (Vehicle) – The class that will be instantiated by the
connect()method. This can be any sub-class ofVehicle(and defaults toVehicle). - rate (int) – Data stream refresh rate. The default is 4Hz (4 updates per second).
- baud (int) – The baud rate for the connection. The default is 115200.
- heartbeat_timeout (int) – Connection timeout value in seconds (default is 30s). If a heartbeat is not detected within this time an exception will be raised.
- source_system (int) – The MAVLink ID of the
Vehicleobject returned by this method (by default 255). - source_component (int) – The MAVLink Component ID fo the
Vehicleobject returned by this method (by default 0). - use_native (bool) –
Use precompiled MAVLink parser.
Note
The returned
Vehicleobject acts as a ground control station from the perspective of the connected “real” vehicle. It will process/receive messages from the real vehicle if they are addressed to thissource_systemid. Messages sent to the real vehicle are automatically updated to use the vehicle’starget_systemid.It is good practice to assign a unique id for every system on the MAVLink network. It is possible to configure the autopilot to only respond to guided-mode commands from a specified GCS ID.
The
status_printerargument is deprecated. To redirect the logging from the library and from the autopilot, configure thedronekitandautopilotloggers using the Pythonloggingmodule.
Returns: A connected vehicle of the type defined in
vehicle_class(a superclass ofVehicle).